Mars'O Bot

MARS’O BOT: A MARS SOCIETY AUSTRALIA ROBOTICS PROJECT
S. W. Hobbs
The Mars’O Bot project proposes to develop affordable rover platforms suitable for undertaking scientific exploration in terrestrial environments analogous to Mars. In order to achieve this Mars’O Bot is derived from a simplified existing Mars rover design successfully trialled by JPL; the Russian Marsokhod. Mars’O Bot employs a low centre of gravity, independent suspension, skid steering and six wheeled drive. Mars’O Bot is also controlled by the versatile, open source Arduino microprocessor architecture and is also designed to accommodate solar power generation, a multispectral camera and has room for an additional 2 kg of scientific payload.
AIMS
Mars’O Bot aims to provide a platform that is able to conduct productive scientific missions in a hostile environment and be useful for teaching students about electronics and robotics through the following:
- Mechatronics and microcontroller programming using based on the Atmel Arduino;
- Designing and implementing mission specific scientific payloads;
- Off world soil excavation and processing;
- Principles of serial communications, including transmission error handling;
- Renewable energy generation, power management and their impact on rover operations;
- Application of multispectral remote sensing to mineralogy and geomorphology;
- Principles of remote navigation and obstacle avoidance; and
- Demonstrating tradeoffs between methods of operation (eg semi-autonomous vs fully autonomous behaviour);
ARTICLES AND PUBLICATIONS:
Mobility Testing the A4 Rover for Planetary Science Investigations
DEVELOPMENT OF AN OPEN SOURCE ROVER FOR PLANETARY SCIENCE
DEVELOPING AND TESTING OF A LOW-COST SPECTROMETER FOR ROBOTICS APPLICATIONS
PLATFORM SPECIFICATIONS:

Big Blue Rover
Size: 1m long
Payload capacity: 10kg;
Electronics: 2 X arduino (one science, 1 vehicle mobility control);
Control: 2.4GHz R/C (mobility), 2.4GHz serial (science, GPS);
Mobility: 4WD skid steered robot powered by 4 12V motors in the wheel hubs.
Experiments: colour FPV camera, GPS, Temp and pressure experiments;

Mining Rover (under construction)
Size: 1m long
Payload capacity: 10+kg (each motor is rated to 25kg lifting capacity);
Electronics: 2 X arduino (one science, 1 vehicle mobility control);
Control: 2.4GHz R/C (mobility), 2.4GHz serial (science, GPS);
Mobility: 8WD on four rocker bogies skid steered robot powered by 8 6V motors geared to the wheels.
Experiments: colour FPV camera, GPS, soil extraction and processing (to be fitted);


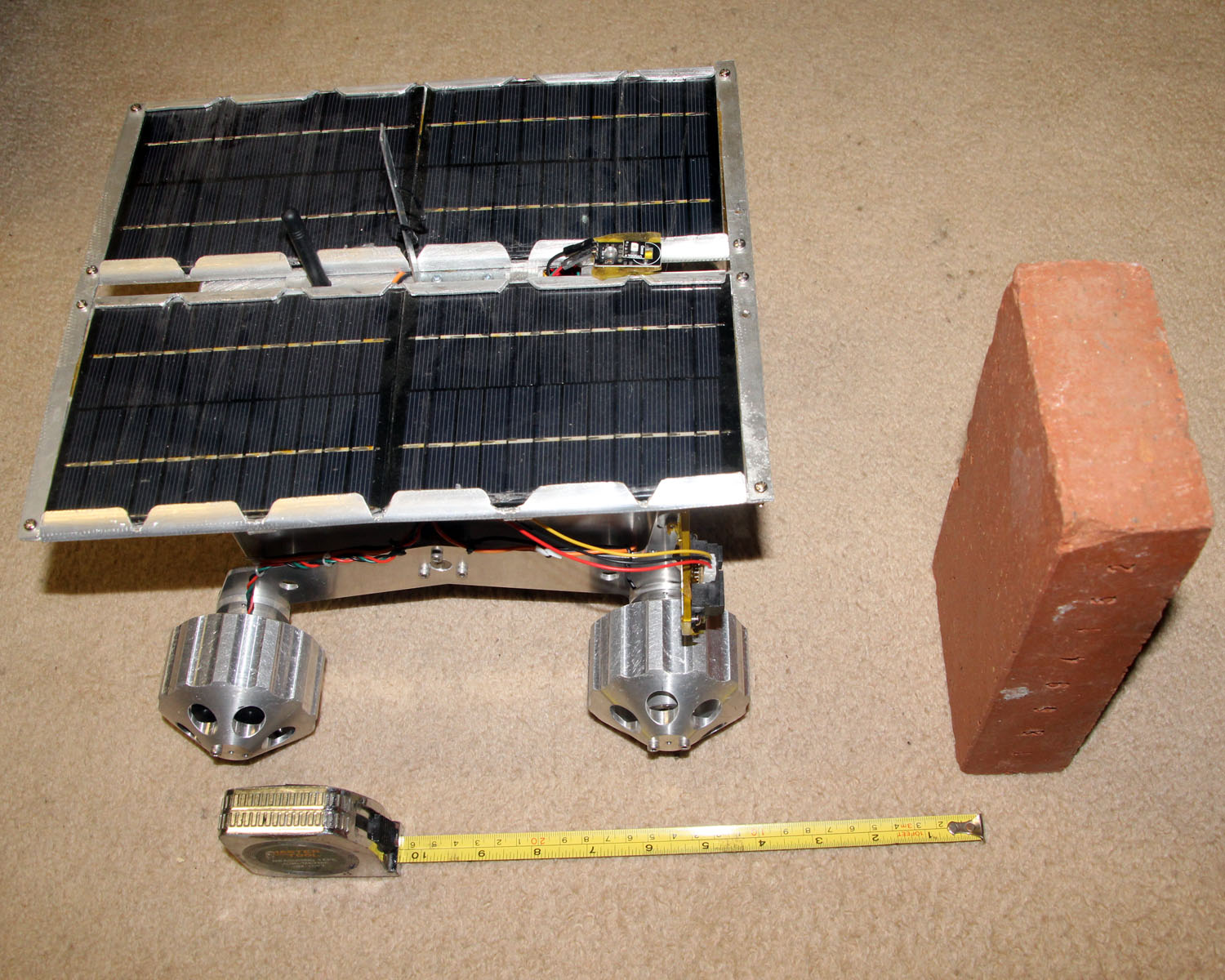
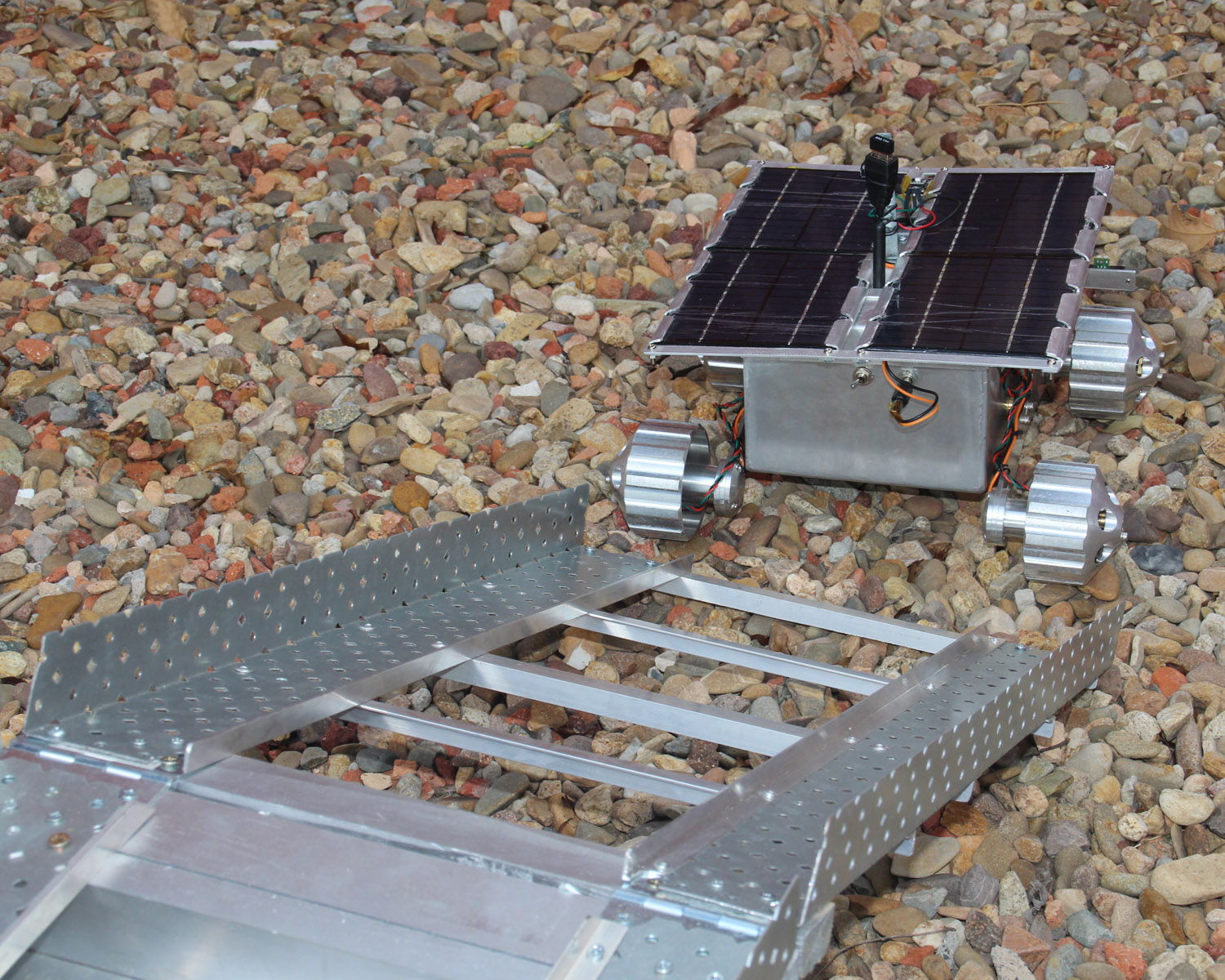
Little Blue Rover (under construction)
Size: 55cm long
Payload capacity: 2kg;
Electronics: 2 X arduino (one science, 1 vehicle mobility control);
Control: 2.4GHz R/C (mobility), 2.4GHz serial (science, GPS);
Mobility: 4WD skid steered robot powered by 4 12V 5A motors in the wheel hubs (chassis retrofitted with high power motors).
Experiments (to be fitted): colour multispectral FPV camera, solar panels, GPS, Temp and pressure experiments, hazard ultrasonic sensors;
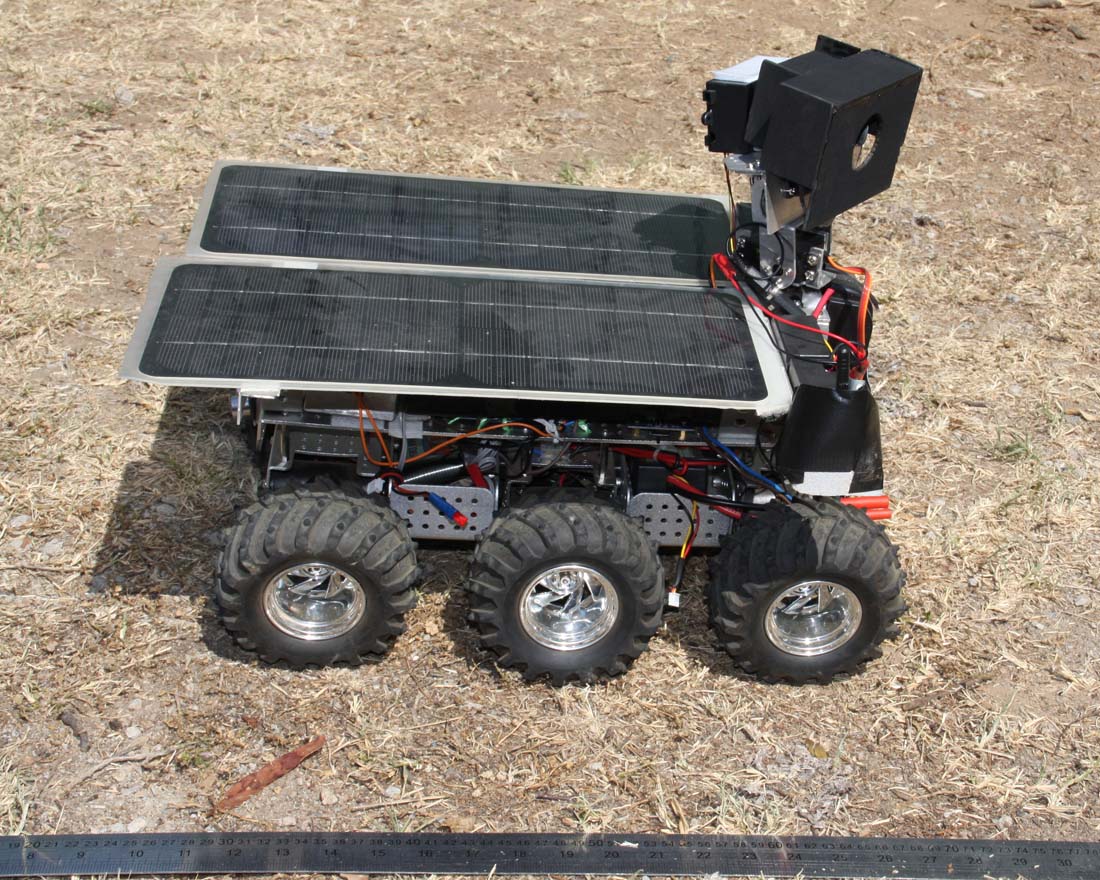
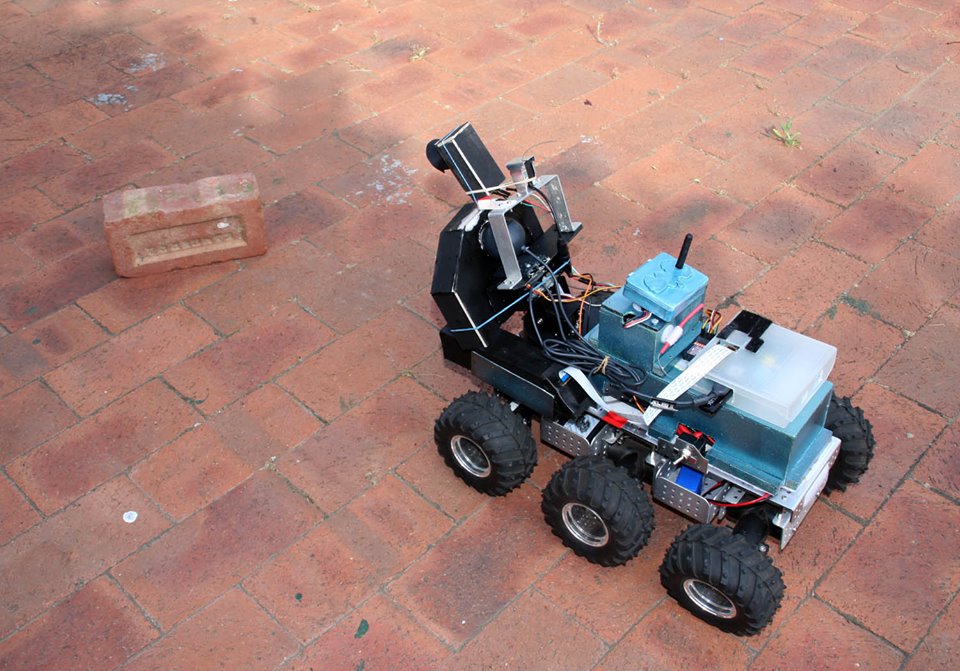
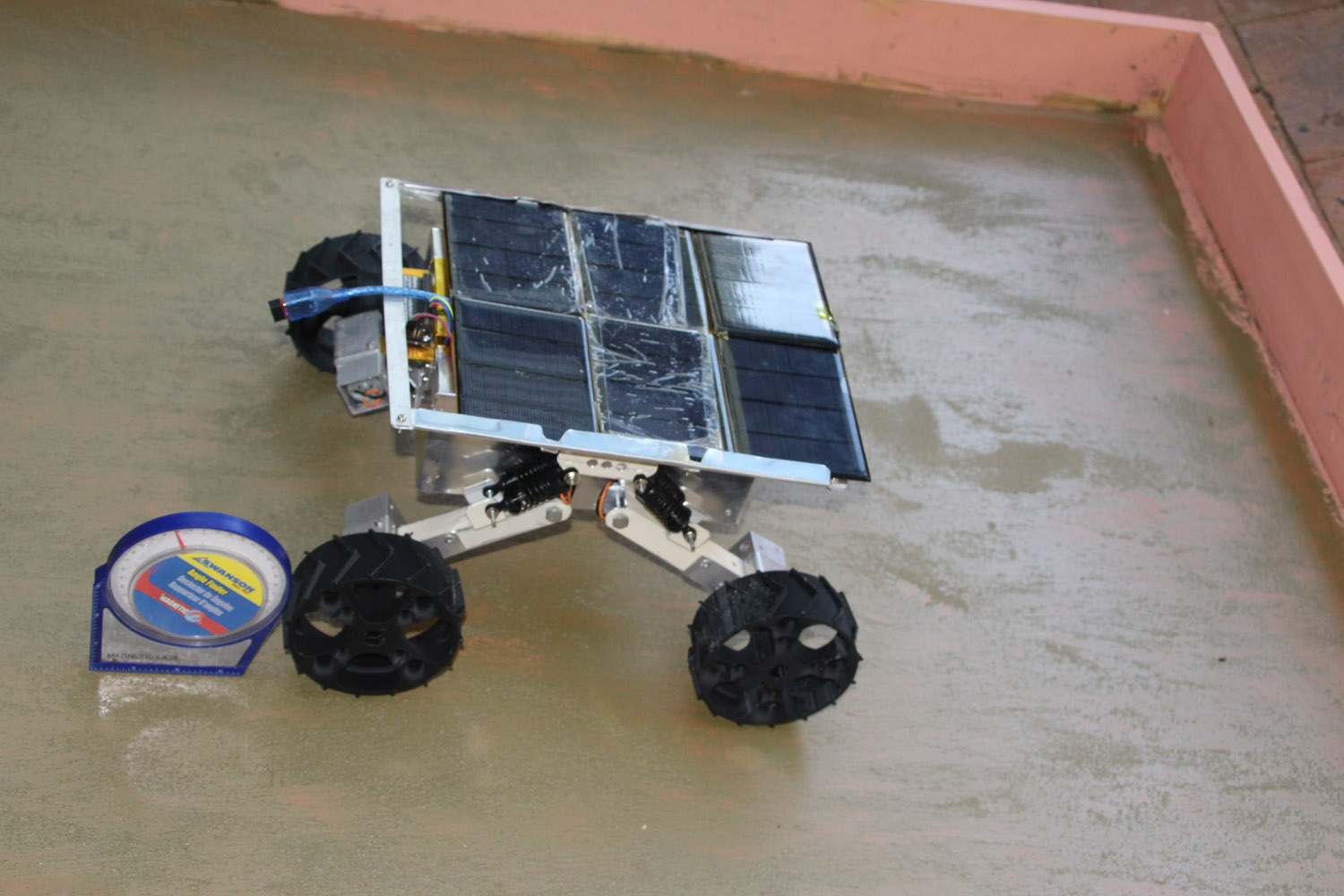
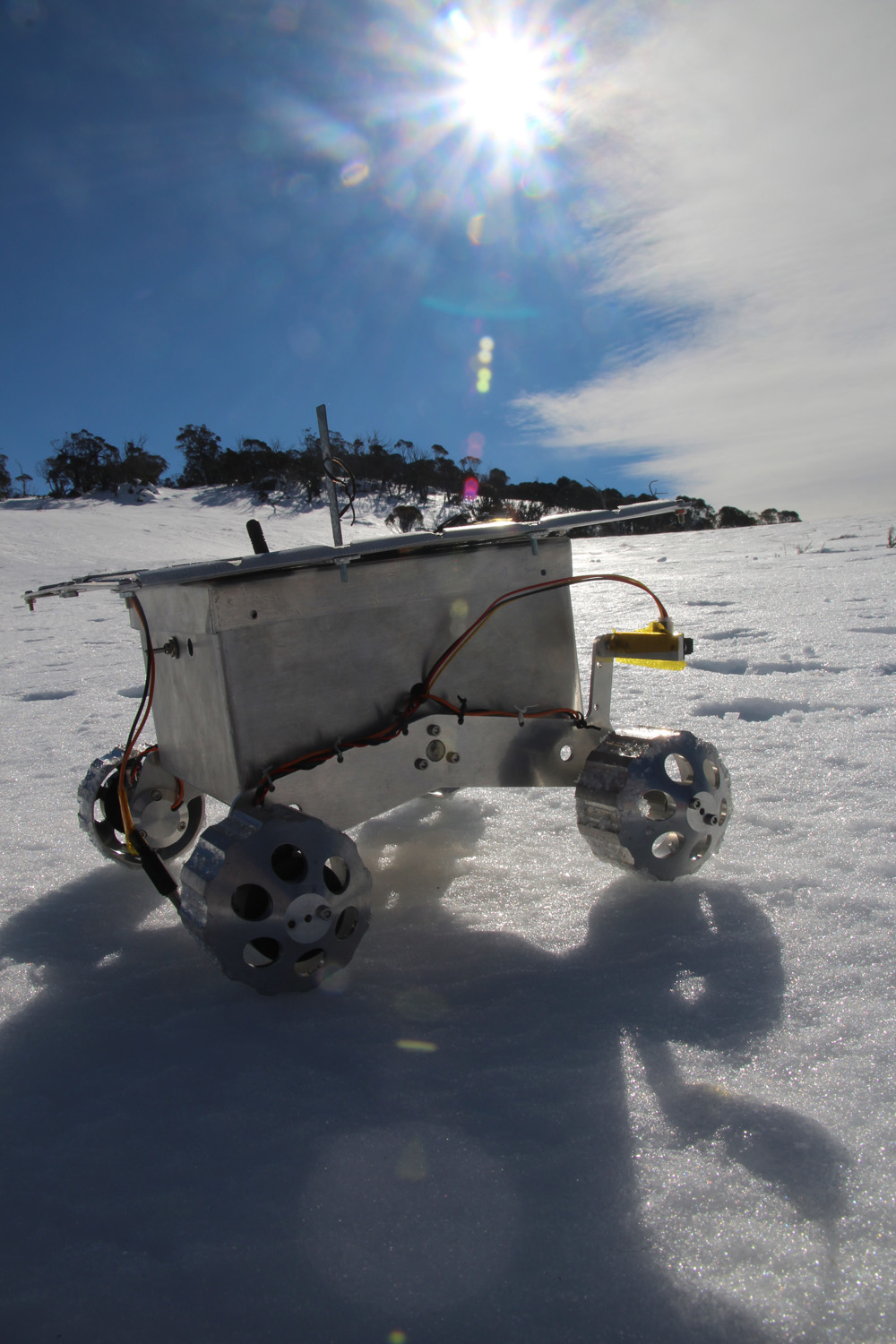
MarsObot
Size: 45cm long
Payload capacity: 1kg;
Electronics: 2 X arduino (one science, 1 vehicle mobility control);
Control: 2.4GHz R/C (mobility), 2.4GHz serial (science, GPS);
Mobility: 6WD skid steered robot powered by 6 6V 2A motors in the wheel hubs;
Experiments: colour multispectral FPV camera, solar panels, Temp and pressure experiments, rear hazard ultrasonic sensor.

Marsobot Junior
Size: 45cm long
Weigh:t 6 kg.
Payload capacity: 1kg
Electronics: 2 X arduino (one science, 1 vehicle mobility control);
Control: 2.4GHz R/C (mobility), 2.4GHz serial, Raspberry Pi vision system
Mobility: 6WD skid steered robot powered by 6 6V 2A motors in the wheel hubs;
Experiments: colour multispectral (four bands) camera, spectrometer, webcam, GPS.
Built for and to be tested on Spaceward Bound New Zealand
Further Images






Help the MSA!
This week @ NASA

